Simulink 是 MATLAB 的一个扩展工具箱,广泛用于动态系统建模、仿真和分析。本教程将介绍 Simulink 的基本使用方法和建模步骤,帮助初学者快速入门。
第一步:启动 Simulink
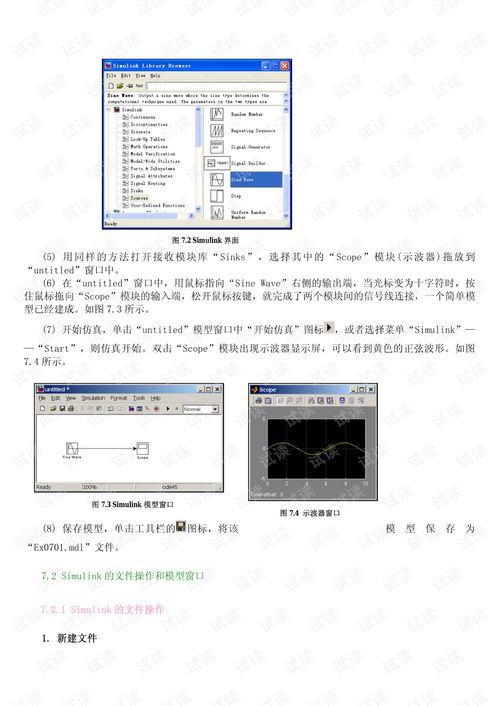
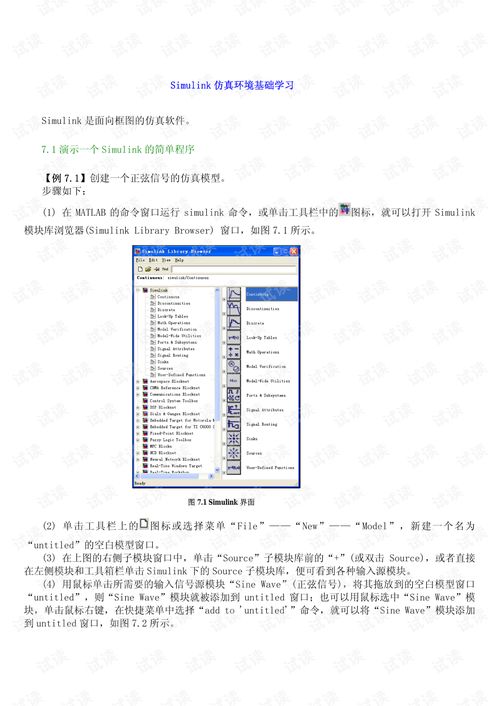
在 MATLAB 命令窗口中输入 simulink 并按回车键,或者点击主页上的 Simulink 图标,即可打开 Simulink 库浏览器。
第二步:创建新模型
在 Simulink 库浏览器中,选择“文件” > “新建” > “模型”,打开一个新的模型编辑窗口。
第三步:添加模块
从库浏览器中拖放所需的模块到模型窗口中。常用模块包括:
- Sources(信号源):如 Sine Wave、Step 等,用于生成输入信号。
- Sinks(输出):如 Scope、Display 等,用于显示仿真结果。
- Continuous(连续系统):如 Integrator、Transfer Fcn 等,用于模拟动态系统。
第四步:连接模块
使用鼠标将模块的输出端口拖到另一个模块的输入端口,以连接信号线。确保信号流向正确。
第五步:设置参数
双击模块可以打开参数设置对话框,调整模块的属性,例如信号幅度、频率或传递函数系数。
第六步:运行仿真
在模型窗口的工具栏中设置仿真时间(如 0 到 10 秒),然后点击“运行”按钮开始仿真。仿真完成后,打开 Scope 模块查看结果波形。
示例:简单系统建模
以模拟一个简单的一阶系统为例:
- 添加一个 Sine Wave 模块作为输入信号。
- 添加一个 Transfer Fcn 模块,设置传递函数为 1/(s+1)。
- 添加一个 Scope 模块用于显示输出。
- 连接所有模块并运行仿真,观察系统的阶跃响应或正弦响应。
通过 Simulink,用户可以直观地构建和仿真复杂系统,无需编写大量代码。建议多加练习,熟悉常用模块和仿真设置,以提升建模效率。